







بائیں ہاتھ کی حکمرانی، دائیں ہاتھ کی حکمرانی، دائیں ہاتھ کے اسکرو کا اصول۔بائیں ہاتھ کا اصول، یہ موٹر گردش کی قوت کے تجزیہ کی بنیاد ہے۔سیدھے الفاظ میں، یہ مقناطیسی میدان میں کرنٹ لے جانے والا موصل ہے، جو قوت سے متاثر ہوگا۔
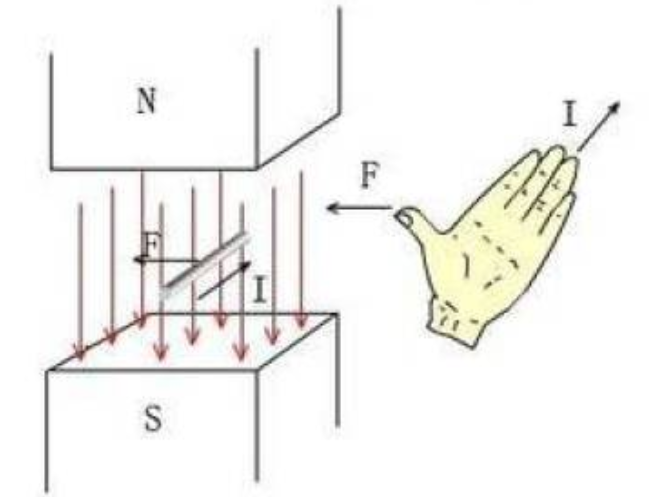
مقناطیسی فیلڈ لائن کو ہتھیلی کے سامنے سے گزرنے دیں، انگلیوں کی سمت کرنٹ کی سمت ہے، اور انگوٹھے کی سمت مقناطیسی قوت کی سمت ہے۔قوت کا کرشن مقناطیسی فیلڈ لائنوں کو کاٹتا ہے تاکہ الیکٹرو موٹیو قوت پیدا ہو۔
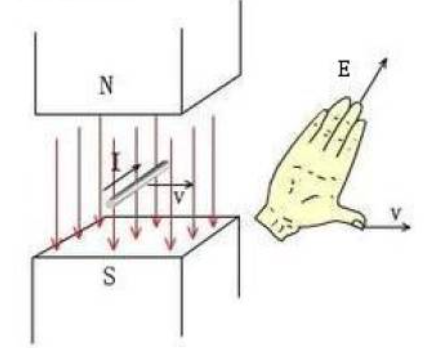
مقناطیسی فیلڈ لائن کو ہتھیلی سے گزرنے دیں، انگوٹھے کی سمت حرکت کی سمت ہے، اور انگلی کی سمت پیدا ہونے والی الیکٹرو موٹیو قوت کی سمت ہے۔حوصلہ افزائی الیکٹرو موٹیو فورس کے بارے میں کیوں بات کریں؟مجھے نہیں معلوم کہ آپ کا کوئی ایسا ہی تجربہ ہے۔جب آپ موٹر کے تھری فیز تاروں کو جوڑ کر موٹر کو ہاتھ سے گھماتے ہیں تو آپ کو معلوم ہوگا کہ مزاحمت بہت زیادہ ہے۔اس کی وجہ یہ ہے کہ انڈکشن موٹر کی گردش کے دوران ہوتا ہے۔الیکٹرو موٹیو قوت کرنٹ پیدا کرتی ہے، اور مقناطیسی میدان میں کنڈکٹر کے ذریعے بہنے والا کرنٹ گردش کی سمت کے مخالف قوت پیدا کرے گا، اور ہر کوئی محسوس کرے گا کہ گردش کے خلاف بہت زیادہ مزاحمت ہے۔
تھری فیز تاروں کو الگ کر دیا گیا ہے اور موٹر کو آسانی سے موڑا جا سکتا ہے۔
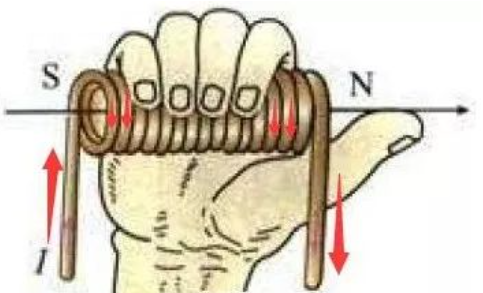
تین فیز لائنیں مشترکہ ہیں، اور موٹر کی مزاحمت بہت بڑی ہے۔دائیں ہاتھ کے اسکرو کے اصول کے مطابق، انرجیائزڈ سولینائیڈ کو دائیں ہاتھ سے پکڑیں، تاکہ چاروں انگلیاں کرنٹ کی طرح ایک ہی سمت میں جھک جائیں، پھر انگوٹھے سے اشارہ کیا گیا سرہ توانائی بخش سولینائیڈ کا N قطب ہے۔
یہ اصول متحرک کنڈلی کی قطبیت کو جانچنے کی بنیاد ہے، اور سرخ تیر کی سمت موجودہ سمت ہے۔تین اصولوں کو پڑھنے کے بعد، آئیے موٹر گردش کے بنیادی اصولوں پر ایک نظر ڈالتے ہیں۔پہلا حصہ: DC موٹر ماڈل ہمیں DC موٹر کا ایک ماڈل ملتا ہے جس کا مطالعہ ہائی اسکول فزکس میں کیا گیا ہے، اور مقناطیسی سرکٹ تجزیہ کے طریقہ کار کے ذریعے ایک سادہ تجزیہ کرتے ہیں۔
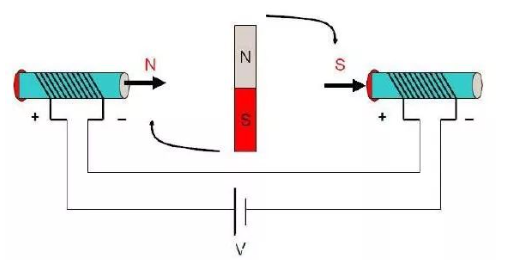
حالت 1 جب دونوں سروں پر کنڈلیوں پر کرنٹ لگایا جاتا ہے، دائیں ہاتھ کے اسکرو کے اصول کے مطابق، لاگو مقناطیسی انڈکشن شدت B (جیسا کہ موٹے تیر سے دکھایا گیا ہے) پیدا ہوگا، اور درمیان میں روٹر بنانے کی کوشش کرے گا۔ جہاں تک ممکن ہو اس کی اندرونی مقناطیسی انڈکشن لائن کی سمت۔بیرونی مقناطیسی فیلڈ لائن کی سمت ایک مختصر ترین بند مقناطیسی فیلڈ لائن لوپ بنانے کے لیے مطابقت رکھتی ہے، تاکہ اندرونی روٹر گھڑی کی سمت میں گھومے۔جب روٹر کے مقناطیسی میدان کی سمت بیرونی مقناطیسی میدان کی سمت کے لیے کھڑی ہوتی ہے تو، روٹر کا گردشی ٹارک سب سے بڑا ہوتا ہے۔نوٹ کریں کہ "لمحے" کو سب سے بڑا کہا جاتا ہے، "قوت" نہیں۔یہ درست ہے کہ جب روٹر کی مقناطیسی فیلڈ بیرونی مقناطیسی فیلڈ کی سمت میں ہوتی ہے تو روٹر پر مقناطیسی قوت سب سے بڑی ہوتی ہے، لیکن اس وقت روٹر افقی حالت میں ہوتا ہے اور قوت بازو 0 ہوتا ہے، اور یقینا یہ نہیں گھومے گا۔شامل کرنے کے لیے، لمحہ قوت اور قوت بازو کی پیداوار ہے۔اگر ان میں سے ایک صفر ہے، تو مصنوع صفر ہے۔جب روٹر افقی پوزیشن کی طرف مڑتا ہے، اگرچہ یہ گردشی ٹارک سے مزید متاثر نہیں ہوتا ہے، لیکن یہ جڑتا ہونے کی وجہ سے گھڑی کی سمت گھومتا رہے گا۔اس وقت، اگر دو سولینائڈز کی موجودہ سمت کو تبدیل کیا جائے، جیسا کہ نیچے دی گئی تصویر میں دکھایا گیا ہے، روٹر گھومتا رہے گا۔گھڑی کی سمت آگے کی طرف مڑیں
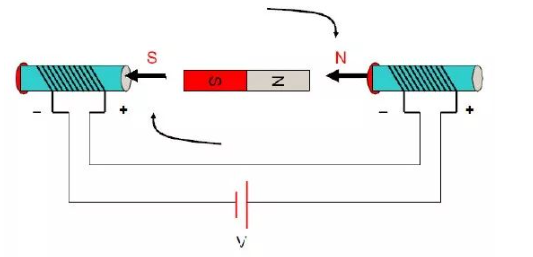
حالت 2 میں، دو سولینائڈز کی موجودہ سمت مسلسل تبدیل ہوتی رہتی ہے، اور اندرونی روٹر گھومتا رہے گا۔کرنٹ کی سمت کو تبدیل کرنے کے اس عمل کو کمیوٹیشن کہا جاتا ہے۔ایک ضمنی نوٹ: جب تبدیل کرنا ہے صرف روٹر کی پوزیشن سے متعلق ہے اور براہ راست کسی دوسری مقدار سے متعلق نہیں ہے۔حصہ 2: تھری فیز ٹو پول اندرونی روٹر موٹر عام طور پر، سٹیٹر کے تھری فیز وائنڈنگز میں سٹار کنکشن موڈ اور ڈیلٹا کنکشن موڈ ہوتا ہے، اور "تھری فیز سٹار کنکشن کا ٹو ٹو کنڈکشن موڈ" سب سے زیادہ عام ہے۔ استعمال کیا جاتا ہے، جو یہاں استعمال ہوتا ہے۔یہ ماڈل ایک سادہ تجزیہ کے لیے استعمال ہوتا ہے۔
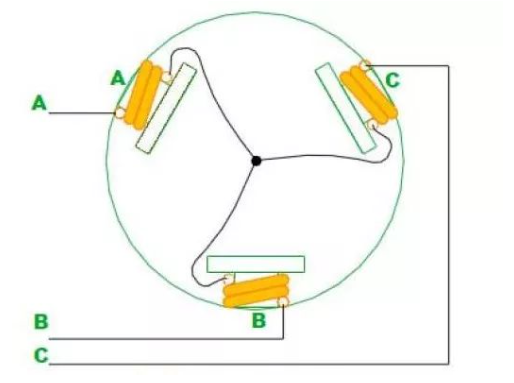
مندرجہ بالا اعداد و شمار سے پتہ چلتا ہے کہ سٹیٹر وائنڈنگز کس طرح جڑے ہوئے ہیں (روٹر کو فرضی دو قطبی مقناطیس کے طور پر نہیں دکھایا گیا ہے)، اور تینوں وائنڈنگز مرکزی کنکشن پوائنٹ کے ذریعے "Y" شکل میں ایک ساتھ جڑے ہوئے ہیں۔پوری موٹر تین تاروں A, B, C کی طرف لے جاتی ہے۔ جب ان کو دو دو کر کے انرجی کیا جاتا ہے تو 6 صورتیں ہیں، یعنی AB, AC, BC, BA, CA, CB۔نوٹ کریں کہ یہ ترتیب میں ہے۔
اب میں پہلے مرحلے کو دیکھتا ہوں: AB مرحلہ متحرک ہے۔
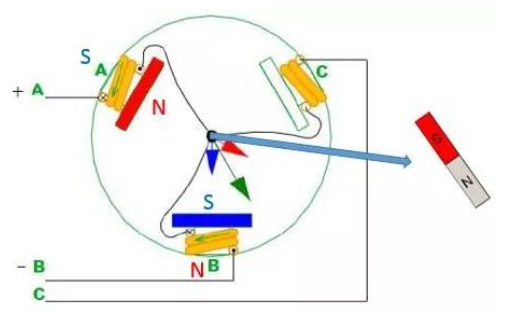
جب AB مرحلہ متحرک ہوتا ہے، A قطب کنڈلی سے پیدا ہونے والی مقناطیسی فیلڈ لائن کی سمت سرخ تیر کے ذریعے دکھائی جاتی ہے، اور B قطب سے پیدا ہونے والی مقناطیسی فیلڈ لائن کی سمت نیلے تیر کے ذریعے دکھائی جاتی ہے، پھر سمت نتیجے میں آنے والی قوت کو سبز تیر کے ذریعہ دکھایا گیا ہے، پھر یہ فرض کرتے ہوئے کہ ایک دو قطبی مقناطیس ہے، N-قطب کی سمت سبز تیر کی طرف سے دکھائی جانے والی سمت کے مطابق ہوگی "درمیان میں روٹر اس کو برقرار رکھنے کی کوشش کرے گا۔ اس کی اندرونی مقناطیسی فیلڈ لائنوں کی سمت بیرونی مقناطیسی فیلڈ لائنوں کی سمت کے مطابق ہے۔جہاں تک C کا تعلق ہے، اس کا فی الحال اس سے کوئی تعلق نہیں ہے۔
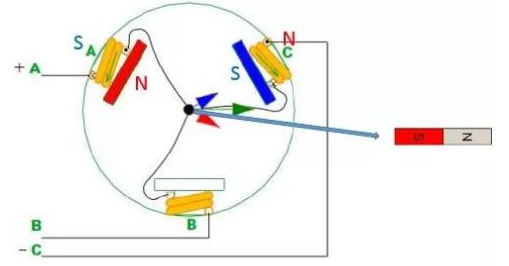
مرحلہ 2: AC فیز متحرک
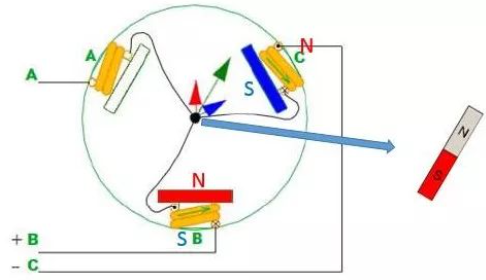
تیسرا مرحلہ: BC مرحلہ برقی کاری
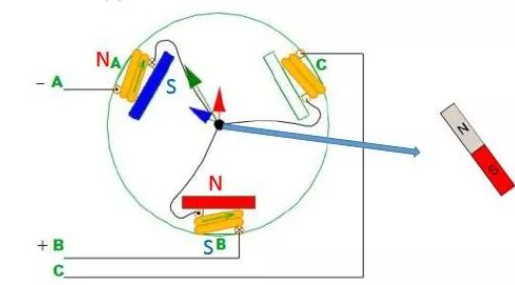
تیسرا مرحلہ: بی اے مرحلہ متحرک ہے۔
انٹرمیڈیٹ مقناطیس (روٹر) کا ریاستی خاکہ درج ذیل ہے: ہر عمل روٹر 60 ڈگری گھومتا ہے

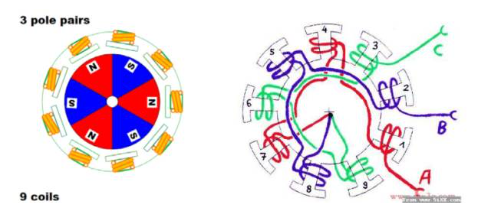
مکمل گردش چھ عملوں میں مکمل ہوتی ہے، جن میں سے چھ تبدیلیاں کی جاتی ہیں۔تیسرا حصہ: تھری فیز ملٹی ونڈنگ ملٹی پول اندرونی روٹر موٹر آئیے ایک زیادہ پیچیدہ پوائنٹ کو دیکھتے ہیں۔شکل (a) ایک تھری فیز نو وائنڈنگ سکس پول (تھری فیز، نو وائنڈنگ، سکس پول) موٹر ہے۔مخالف قطب) اندرونی روٹر موٹر، اس کا سمیٹ کنکشن تصویر (b) میں دکھایا گیا ہے۔یہ شکل (b) سے دیکھا جا سکتا ہے کہ تین فیز وائنڈنگز بھی درمیانی نقطہ پر ایک ساتھ جڑے ہوئے ہیں، جو کہ ایک ستارہ کنکشن بھی ہے۔عام طور پر، موٹر کے وائنڈنگز کی تعداد مستقل مقناطیسی کھمبوں کی تعداد سے مطابقت نہیں رکھتی ہے (مثال کے طور پر، 6 وائنڈنگز اور 6 پولز کی بجائے 9 وائنڈنگز اور 6 پولز استعمال کیے جاتے ہیں)، تاکہ سٹیٹر کے دانتوں کو روکا جا سکے۔ روٹر کے میگنےٹ کو اپنی طرف متوجہ کرنے اور سیدھ میں لانے سے۔
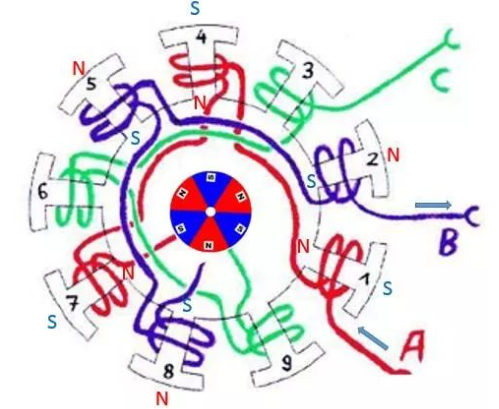
اس کی حرکت کا اصول یہ ہے: روٹر کے N قطب اور توانائی سے چلنے والی وائنڈنگ کے S قطب میں سیدھ میں ہونے کا رجحان ہے، اور روٹر کا S قطب اور توانائی سے چلنے والے وائنڈنگ کے N قطب میں سیدھ میں ہونے کا رجحان ہے۔یعنی S اور N ایک دوسرے کو اپنی طرف متوجہ کرتے ہیں۔نوٹ کریں کہ یہ پچھلے تجزیہ کے طریقے سے مختلف ہے۔ٹھیک ہے، آئیے آپ کو اس کا دوبارہ تجزیہ کرنے میں مدد کرتے ہیں۔پہلا مرحلہ: AB مرحلہ برقی ہے۔
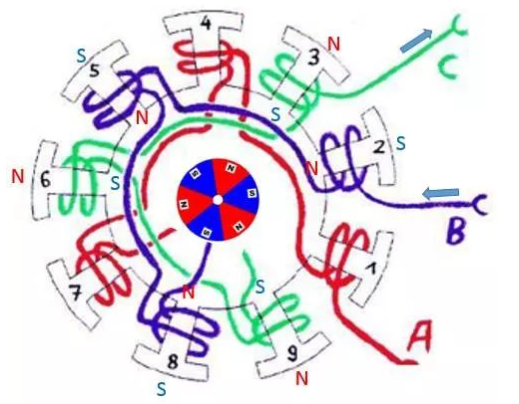
مرحلہ 2: AC فیز متحرک

تیسرا مرحلہ: BC مرحلہ برقی کاری
پوسٹ ٹائم: اکتوبر 21-2022